< Назад | Содержимое | Далее >
3.4 Конфигурация устройств
Маяк-623 (Маяк-623~1)(вкл.) Платоместо
ЦАП6-ФМ (ЦАП6-ФМ~1)(вкл.)
EtherCAT
Привод Accurax G5~1(вкл.) can1
can2
МВВ-024С (МВВ-024С~1)(вкл.) МВВ-116РС (МВВ-116РС~1)(вкл.)
can3
Пульт Станка 448~1(вкл.) rs485
ssi
Датчик SSI~1(вкл.)
Для конфигурации какого-либо устройства необходимо установить на него курсор и нажать <ENTER>.
Имя Маяк-623~1
[X] Включено
Информация об устройстве
Имя: Контроллер периферии Код производителя: 1 [pcon.jpg]
Конфигурация
QUERYPERIOD
Значение
20000 (uint16)
CAN1BITTIMINGINDEX 0x00 (uint16)
CAN1SYNCDIVIDER 1 (uint16) CAN2BITTIMINGINDEX 0x00 (uint16) CAN2SYNCDIVIDER 4 (uint16)
Вне зависимости от того, будут в устройстве меняться какие-либо настройки или нет, для правильной регистрации устройства в него необходимо хотя бы один раз зайти и, затем, выйти кнопкой [ Внести изменения ].
Информация об устройстве
Имя: Привод Omron (EtherCAT) Код производителя: 131
Идентификация устройства
Конфигурация
Наличие и состав параметров зависит от конкретного устройства
Данные
Настройка ресурсов устройства
Имя Привод Accurax G5~1 [х] Включен
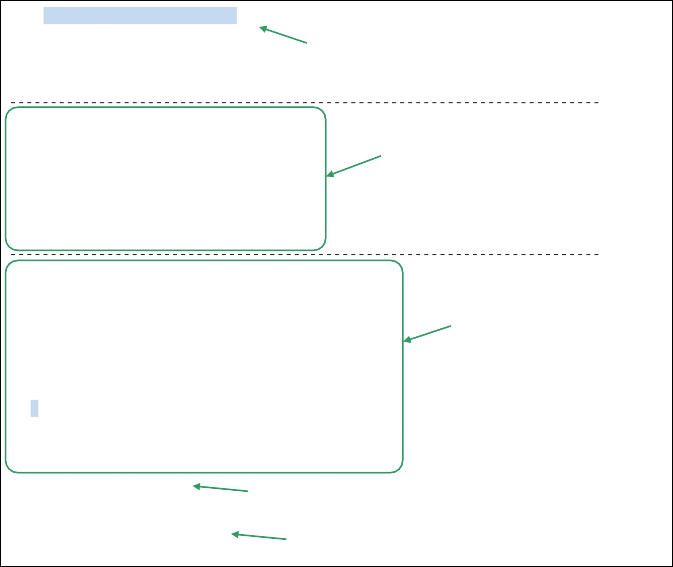
Страница конфигурации устройства в общем случае имеет следующий вид:
Значение | ||
MAXRPM | 30000 | (uint16) |
ENCODERBITS | 20 | (uint16) |
SYNCOFFSET | 0 | (uint16) |
ENCODERTYPE | 2 | (uint16) |
Делитель | Смещение | |
[x] Код ошибки | 0 | 0 |
[x] Регистр статуса | 0 | 0 |
[x] Текущий момент | 0 | 0 |
[x] Регистр команд | 0 | 0 |
[ ] Код скорости | 0 | 0 |
[x] ДОС | 0 | 0 |
[x] Задание | 0 | 0 |
Адрес _0 | Адресная информация | |
[ Внести изменения ] [ Удалить устройство ] [ Не сохранять изменения ] | Способы выхода с этой страницы | |
Цветом показаны элементы, которые можно изменить.
В поле идентификации устройства заносится его символьное имя и признак включения или отключения данного устройства в конфигурацию. Символьное имя может быть любым, длиною не более 32 знаков. Оно используется в следующих местах:
таблицах конфигурации оборудования;
в тексте ПЭС при использовании команды DEV;
при индикации ошибки устройства.
По этой причине рекомендуется, чтобы имя было максимально информативным и кратким, например, "Привод U" или "МВВ-024С А27" или "МВВ-404С на суппорте" и т.п.
Поле "Конфигурация" содержит настройки, состав и наличие которых индивидуальны для каждого типа устройства. Для устройств, являющихся составными частями УЧПУ "Маяк", назначение настроек будет приведено в конце главы. Для устройств стороннего производства необходимо читать инструкции по их подключению к УЧПУ "Маяк".
Поле "Данные" имеет три столбца. В первом столбце производится включение или отключение опрашиваемых/передаваемых ресурсов устройства. При наличии символа [x] данный ресурс будет опрашиваться или передаваться вне зависимости от настроек в таблицах конфигурации ввода-вывода. Поэтому все неиспользуемые ресурсы должны быть отключены.
Столбцы "Делитель" и "Смещение" показывают, с какой периодичностью и с каким сдвигом передавать выходные или запрашивать входные данные:
0 или 1*
не важно
Данные 1
2
0
Данные 2
4
1
Данные 3
4
2
Данные 4
Делитель
Смещение
Прерывания
Выдача данных
* Если делитель равен нулю, то данные будут гарантированно выдаваться/опрашиваться каждое прерывание в жестко отведенное время. Это необходимо, например, для управления приводами подач. Если делитель равен единице, то данные будут выдаваться/опрашиваться каждое прерывание, только если останется свободное время.
Для входных данных устройств, подключенных по CAN, значение имеет только "Делитель". Если он равен нулю, то каждое прерывание будет контролироваться поступление пакета с этими данными, и время прихода пакета будет учитываться в строке g(1) страницы QSEL (см. Инструкцию по составлению ПЭС). Во всех остальных случаях время и периодичность прихода пакета будет неизвестным, т.к. оно определяется периферийным устройством. Соответственно, неизвестным будет и периодичность обновления данных.
Значение адресной информации зависит от способа подключения устройства:
Подключение | Физический смысл адреса |
Платоместо | Старший байт – номер сигнала выборки платы для входной части блока, младший – для выходной. Адрес задается конфигуратором автоматически для каждого платоместа и типа устройства и изменению не подлежит |
EtherCAT | Положение устройства от УЧПУ в цепи кабельных соединений канала, начиная с нуля. Например, первое по кабелю от УЧПУ устройство будет иметь адрес 0, второе – 1, и т.д. Положение адресных переключателей на устройстве не учитывается! |
CAN | Адрес устройства (Node Id), может принимать значения от 1 до 127 |
RS-485 | Адрес устройства, может принимать значения от 1 до 127 |
SSI | Номер канала ДОС модуля Маяк-ВВ 405А, может принимать значения от 1 (ДОС1) до 5 (ДОС5). |
Название | По умолча- нию | Диа- пазон | Описание |
QUERYPERIOD | 25000 | 500- 65535 | Период прерываний, он же такт работы БПрО и такт интерполяции, 0,1 мкс |
CAN1BITTIMINGINDEX | 0x00 | 0x00- 0x38 | Индекс битовой скорости канала CAN1: 0хТ0: 1000 кбит/с 0хТ1: 800 кбит/с 0хТ2: 500 кбит/с 0хТ3: 250 кбит/с 0хТ4: 125 кбит/с 0хТ5: 100 кбит/с 0хТ6: 50 кбит/с 0хТ7: 20 кбит/с 0хТ8: 10 кбит/с, где Т – номер таблицы от 0 до 3, позволяющий реализовать одну и ту же скорость с разным распределением времени внутри бита |
CAN1SYNCDIVIDER | 1 | 1-255 | Периодичность выдачи пакета SYNC в канал CAN1, прерываний |
CAN2BITTIMINGINDEX | 0x03 | 0x00- 0x08 | Индекс битовой скорости канала CAN2 (см. CAN1BITTIMINGINDEX) |
CAN2SYNCDIVIDER | 4 | 1-255 | Периодичность выдачи пакета SYNC в канал CAN2, прерываний |
CAN3BITTIMINGINDEX | 0x03 | 0x00- 0x08 | Индекс битовой скорости канала CAN3 (см. CAN1BITTIMINGINDEX при Т=0) |
CAN3SYNCDIVIDER | 4 | 1-255 | Периодичность выдачи пакета SYNC в канал CAN3, прерываний |
RS485BAUDRATE | 115200 | 1200- 115200 | Скорость передачи по каналу RS-485, кбит/с |
RS485MODE | 0x20 | 0x00- 0x3F | Режим RS-485, назначение битов: 0х01: 0 или 1 – 1 или 2 стоп бита; 0х02: 0 или 1 – 8 или 9 бит, включая контрольный; 0х04: 0 или 1 – отсутствие или наличие контрольного разряда; 0х08: 0 или 1 – контрольный разряд (если включен): четность или нечетность; 0х10: 0 или 1 – асинхронный или синхронный (не поддерживается) обмен; 0х20: 0 или 1 – полный дуплекс (не поддерживается) или полудуплекс. Пример: – для Термодат значение 0x20 – для Lexium32 значение 0x26 |
SSIPERIOD | 40 | 10-142 | Длительность одного периода частоты опроса датчиков, 0,1 мкс. Скважность всегда 50% |
По умолча- нию | Диапазон | Описание | |
INTPERIOD | 8000 | Собственный период прерываний, мкс Соответствует периоду частоты кварцевого резонатора, поделенной на 65536 | |
SLAVE | 0x00 | 0, 1 | 0 – блок является ведомым, синхронизируется от ведущего; 1 – блок является ведущим, остальные блоки синхронизируются от него. С этим же блоком контроллер периферии синхронизирует свои прерывания |
По умолча- нию | Диапазон | Описание | |
FILTERDISABLED | 0 | 0 – фильтр антидребезга включен; 1 – фильтр антидребезга отключен |
По умолча- нию | Диапазон | Описание | |
QUERYPERIOD | 25000 | Не используется | |
NUMBEROFMODULES | 0x00 | 0 - 6 | Число плат расширения, подключенных к контроллеру БВВС |
MODULEID1 - MODULEID6 | 0x00 | 2 | Типы плат, подключенных к контроллеру БВВС: 2 – МВВ-16/32 |
POTENCIOMETERTYPE | 0x00 | Назначение входных данных от энкодеров и потенциометров |
Данные настройки действуют, только если БВВС имеет прошивку 2.37.
По умолча- нию | Диапазон | Описание | |
NUMBEROFBITS | 26 | 6-30 | Число бит датчика |
GRAYCODE | 0x00 | 0, 1 | 0 – выходной код датчика прямой; 1 – выход датчика в коде Грея |
В этом случае за один период прерываний от блока будет два, три или более прерываний КП, и их необходимо синхронизировать.
В конфигурации блока МИ-064 должен быть выставлен параметр INT PERIOD. Для блока ЦАП-5И период прерываний принимается равным 5120 мкс и настройке не подлежит.
Параметр QUERYPERIOD в конфигурации КП (Маяк-623, Маяк-624) должен быть установлен как целочисленный делитель этого периода плюс небольшой запас. Например, при периоде прерываний МИ-064, равном 6 мс, параметр INT PERIOD = 6000 (6 мс), а параметр QUERYPERIOD = 31000 (3,1 мс).
В таких условиях КП:
а) перед началом работы определяет, что период прерывания блока умещается, как минимум, в два прерывания КП;
б) во время работы, каждое второе прерывание, будет производить ожидание прерывания от блока МИ-064 (ЦАП-5И);
в) на основании постоянно измеряемого периода прерываний от блока будет подстраивать период своих прерываний.
Реальный период прерываний КП можно посмотреть в меню QSEL (см. Инструкцию по составлению ПЭС). Он должен оказаться меньше или равен заданному параметру QUERYPERIOD. Для блока МИ-064 с настройками, приведенными выше, он составит 3000 мкс, для блока ЦАП-5И – 2560 мкс.
В каждом блоке должен быть задействован, в первую очередь, ДОС3. Все неиспользуемые ДОС каждого блока должны быть отключены в конфигураторе. В случае если ДОС3 будет отключен (в конфигураторе или физически), будет выдаваться ошибка "Обрыв обратной связи" по первой координате.
Для обеспечения максимального быстродействия рекомендуется (если позволяет топология) равномерно распределять блоки Маяк-ВВ 404С между каналами CAN. Распределение ДОС между блоками в пределах одного канала безразлично.
В параметр CANxSYNCDIVIDER (где х – номер канала CAN, к которому подключен блок), необходимо установить 1.
Если какой-либо из данных блоков установлен в УЧПУ, а в конфигураторе не прописан, то к нему не будет обращения и он, в свою очередь, выдаст аппаратную блокировку. На экране УЧПУ при этом не будет предупреждающих надписей.
В конфигурации всех устройств, которые включены в конфигураторе, необходимо отключать неиспользуемые ресурсы, имеющие в названии слова "Энкодер" или "Маховик". В противном случае они будут участвовать в нумерации маховиков всей системы (см. Инструкцию по составлению ПЭС).